





第5步测试
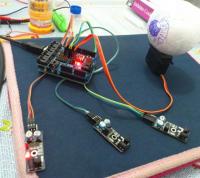
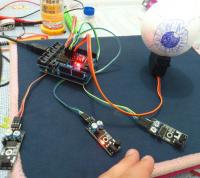
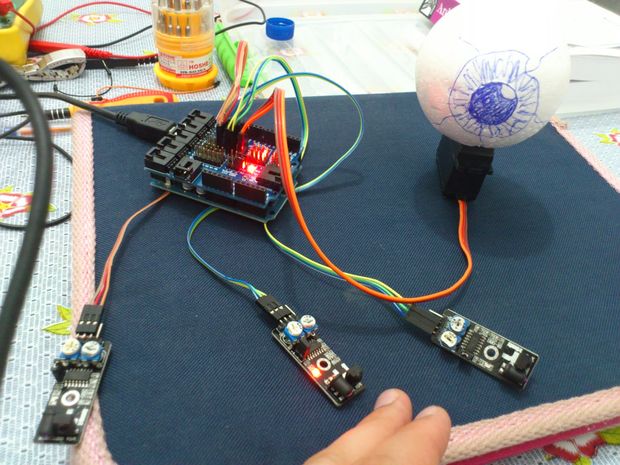
安装正确后,机械眼工作如下:当任一个传感器检测到前面的物体(距离达40cm,可调)时,该传感器的状态从高变到低(5V 到0)。然后Arduino检测到有一个端口产生变化,通过程序,伺服电机随之转动眼球。
类似的制作可有:牛人自制模仿眼球运动的机器
这是用红外传感器做出的一个应用,还可以有其他许多应用。请尽情发挥你的想象力吧!
-------------------------------------------------------------------------------------------
电子说DIY站微博:@dianzishuodiy
电子说DIY QQ:2259214399,QQ群:284837235
猜你会喜欢
国内爱好者开发的蛛蜘机器人
该视频中的蜘蛛机器人一位本钢本人利用业余...

世界上最小的DS18B20温度计
DS18B20不少朋友都用过吧,不过似乎...

iPhone控制的简易物联网
这次我尝试制作一个简单的物联网系统,可以...

TEM36温度传感器
非常容易解释什么是模拟温度传感器,它就是...

基于MK802的摄像头自动光源跟踪
基于MK802的摄像头自动光源跟踪,展示...
评 论
选择昵称后请轻按空格键
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。