











猜你会喜欢
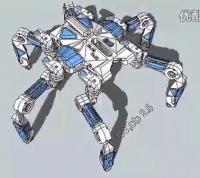
国内爱好者开发的蛛蜘机器人
该视频中的蜘蛛机器人一位本钢本人利用业余...

美国最新军用机器人-Bigdog (波士顿动力研制)
美国军方支持的研究项目, Boston ...

可全方位移动的概念机器人
可全方位移动的概念机器人可全方位移动的概...
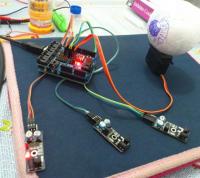
用 Arduino制作机器人眼球
这一次我们用Arduino和红外传感模块...
该视频中的蜘蛛机器人一位本钢本人利用业余...
美国军方支持的研究项目, Boston ...
可全方位移动的概念机器人可全方位移动的概...
这一次我们用Arduino和红外传感模块...
评 论
选择昵称后请轻按空格键
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。